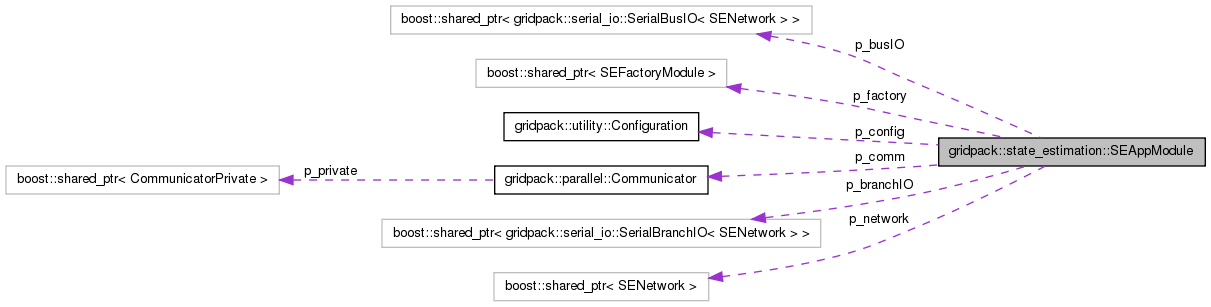
gridpack::state_estimation::SEAppModule Class Reference
#include <se_app_module.hpp>
List of all members.
Constructor & Destructor Documentation
| gridpack::state_estimation::SEAppModule::SEAppModule |
( |
void |
|
) |
|
| gridpack::state_estimation::SEAppModule::~SEAppModule |
( |
void |
|
) |
|
Member Function Documentation
Get list of measurements from external file
- Parameters:
-
| cursor | pointer to contingencies in input deck |
- Returns:
- vector of measurements
| void gridpack::state_estimation::SEAppModule::initialize |
( |
|
) |
|
Set up exchange buffers and other internal parameters and initialize network components using data from data collection
| void gridpack::state_estimation::SEAppModule::readMeasurements |
( |
void |
|
) |
|
Read branch and bus measurements. These will come from a separate file. The name of this file comes from the input configuration file.
Read in and partition the network. The input file is read directly from the state_estimation block in the configuration file so no external file names or parameters need to be passed to this routine
- Parameters:
-
| network | pointer to a SENetwork object. This should not have any buses or branches defined on it. |
| config | pointer to open configuration file |
| void gridpack::state_estimation::SEAppModule::saveData |
( |
|
) |
|
Save results of state estimation calculation to data collection objects
Assume that SENetwork already exists and just cache an internal pointer to it. This routine does not call the partition function. Also read in simulation parameters from configuration file
- Parameters:
-
| network | pointer to a complete SENetwork object. |
| config | pointer to open configuration file |
| void gridpack::state_estimation::SEAppModule::solve |
( |
|
) |
|
Solve the state estimation problem
| void gridpack::state_estimation::SEAppModule::write |
( |
|
) |
|
Write final results of state estimation calculation to standard output
The documentation for this class was generated from the following file:
 1.6.1
1.6.1

